Robotic Aassembly Cell
A portfolio page.
This project is maintained by kohlmann0
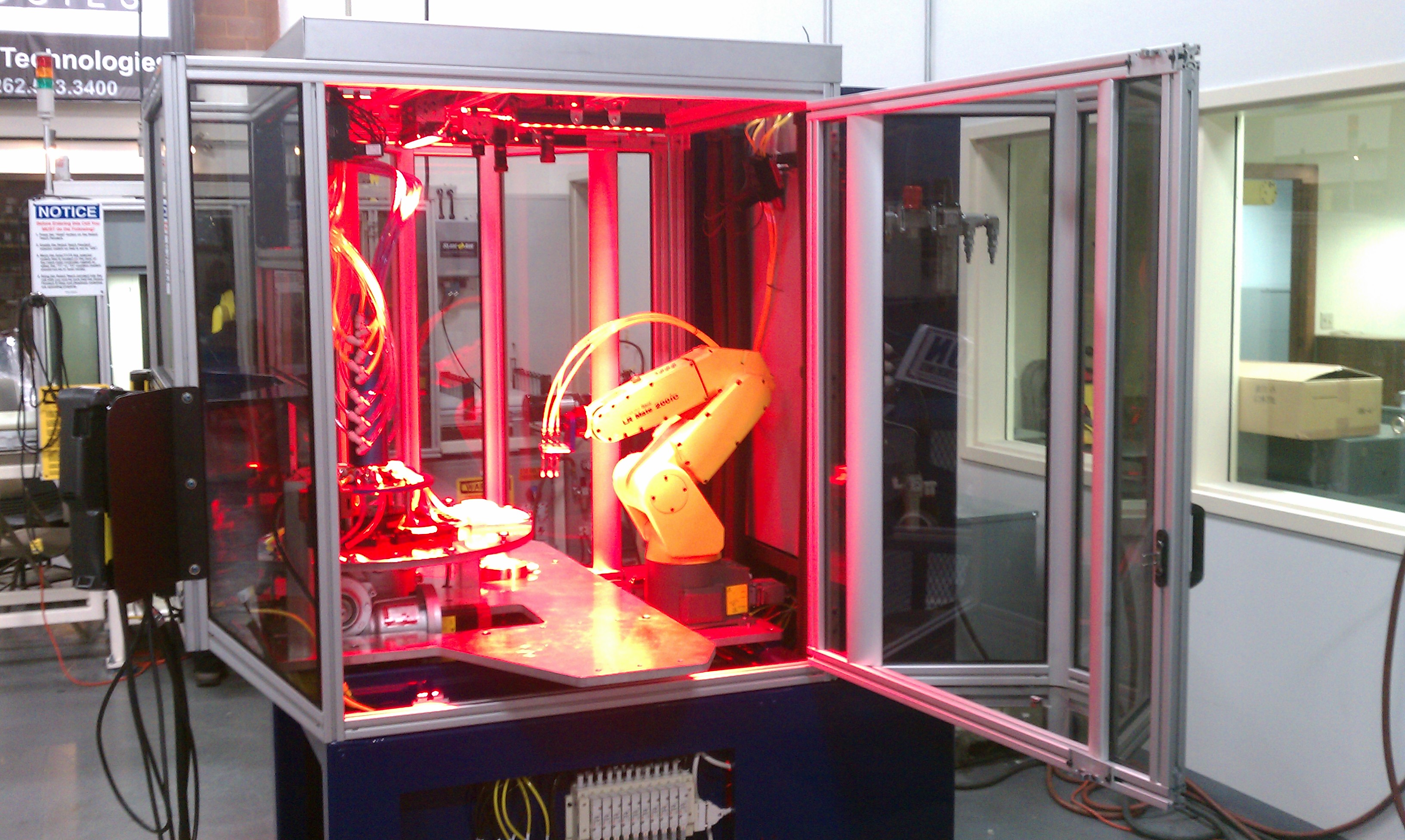
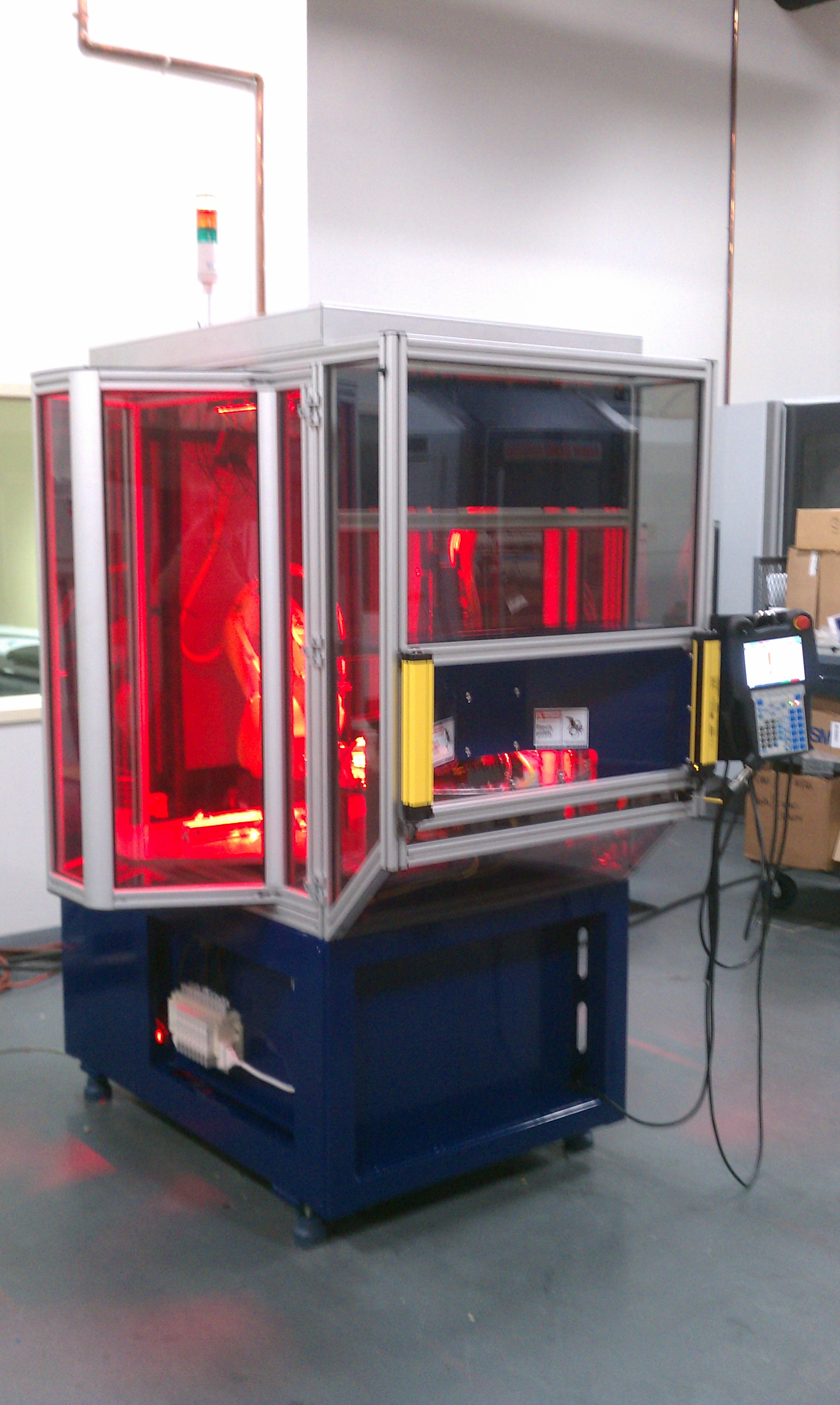
Robotic Assembly Cell
This is a portfolio page to store a 3D model and documentation regarding a robotic assembly cell I designed an built for an employer.
I'm sorry I can't give too many details due to it being work for a previous employer, but the general concept is...
- The operator loads components into the front of the machine.
- Custom designed vacuum fixtures, matching the shape of the parts, hold the pieces in place.
- When vacuum is confirmed on each component, a switch is flipped by the operator which turns the main turntable 30 degrees, and then starts loading the next station on the table. There are a total of 6 stations on the table.
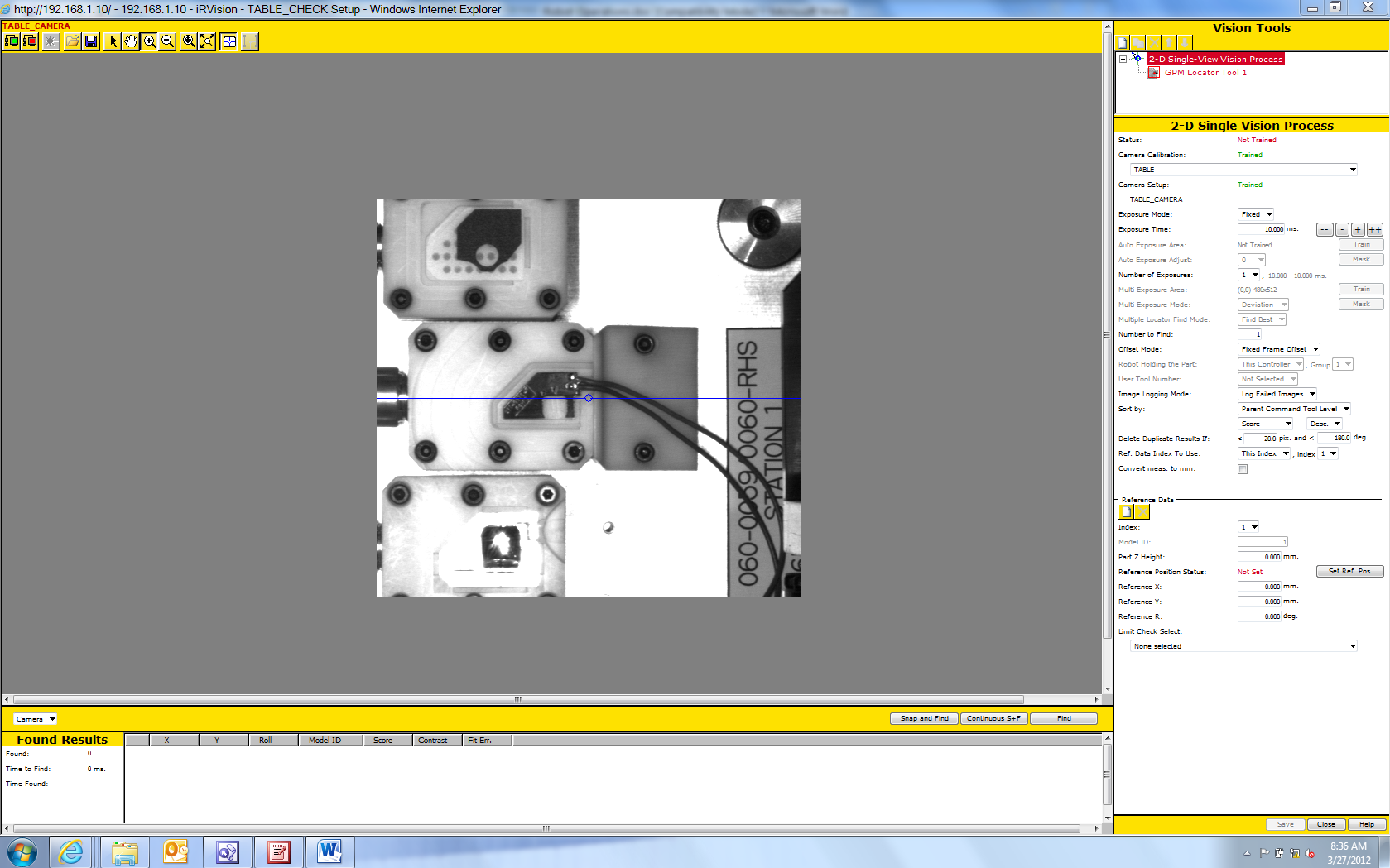
- On the robot side, custom automation shapes wires and peels adhesive gaskets, while the robot vision system picks up components and assembles all the final product.
- Finally, after the parts go through all 6 stations, the finished product comes back out to the operator to be unloaded.
- All of this takes place faster than the operator can load, so the only limiting factor is the operator itself.
Authors and Contributors
Michael Kohlmann (@kohlmann0)